
コンパクトなスペースに設置可能なロボットアームDOBOT MG400

協働ロボット導入における様々な課題、
コスト、設置場所、プログラミングなど中小企業では
導入障壁が高いイメージがありませんか?

あらゆる課題に応えるDOBOT MG400
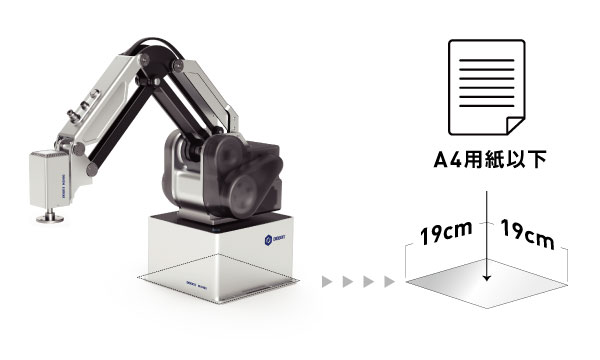
DOBOT MG400は19センチ四方のスペースがあれば設置可能なコンパクトデザインで、エンコーダー搭載のサーボモーターとドライブコントローラーにより精度の高い作業が可能です。UIに優れたインターフェース、直感的に構築できるプログラミングなど、あらゆる業種の生産性向上に最適な協働ロボットです。

生産性を高めるハンドティーチング
DOBOTは、手を使い学習させることが可能です。起点と終点を、手で記憶させ、その動作を正確に再現します。重力補正も装備されており動作を滑らかにします。
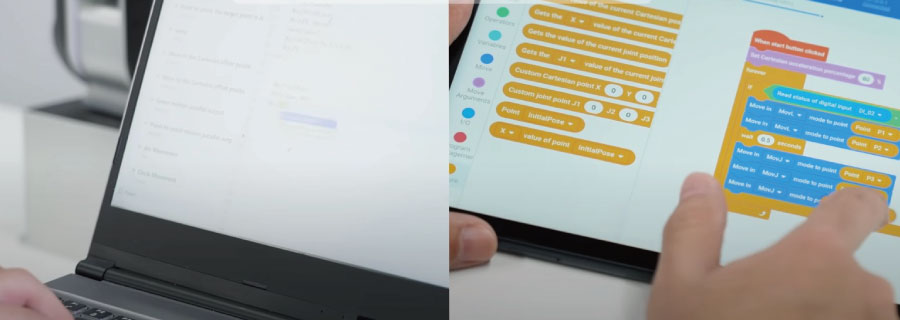
自由度の高いプログラミング
ティーチングコンテンツでは、ビジュアルプログラミング、Lua スクリプト言語プログラミングの3種類の難易度別プログラミングソリューションで、あらゆるレベルのプログラマーをサポートします。

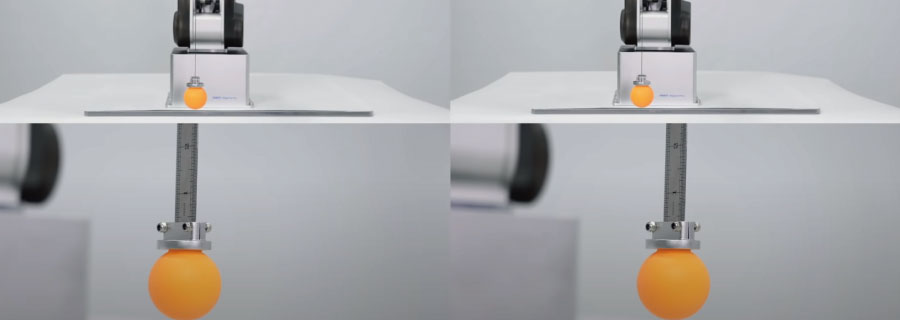
高精度なモーションパス
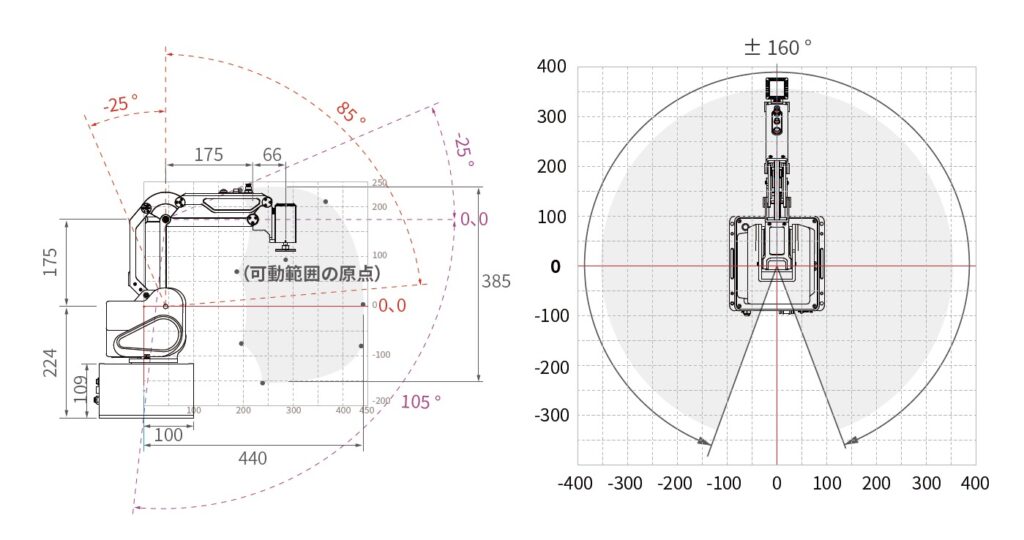
最大動作範囲440mm、繰り返し制度±0.05mmと十分な可動範囲と高精度なモーションパスを保証します。

衝突検知搭載の安全設計
衝突力しきい値12N未満と人との協働を前提に設計された安全設計。利用シーンに合わせて5段階の検出感度を設定が可能です。
振動抑制制御搭載
可動後、停止した際の振動を抑制する制御を搭載。安定化時間を60%向上、残留振動を70%低減を保証します。
パラメータ詳細
| 形式番号 | MG400 |
| 重量(kg) | 8kg |
| 定格可搬重量(kg) | 0.5(最大750g) |
| 動作範囲 | 440mm |
| ベース寸法 | 190mm×190mm |
| 繰り返し精度 | ±0.05mm |
| 入力電源 | 100〜240VAC, 50/60Hz |
| 定格電圧 | 48V |
| 通信方法 | TCP/IP、Modbus TCP |
| 作動温度 | 0℃〜40℃ |
| 標準消費電力 | 150W |
| 関節可動域 | J1>±160° J2>-25° 〜 85° J3>-25° 〜 105° J4>-360° 〜 360° |
| 関節最大速度 | J1/J2/J3/J4>300°/s |